UAV I
POLTEKAD KODIKLATAD
JURUSAN TEKNIK TELEKOMUNIKASI
SISTEM UAV

TUGAS - I
DI SUSUN OLEH:
SERTU SYAHRUL NUR FAUZI 20210623-E
PRODI TEKNIK TELEKOMUNIKASI MILITER
JURUSAN TEKNIK TELEKOMUNIKASI
POLTEKAD KODIKLATAD
TUGAS I UAV
Soal.....
1. Jelaskan apakah yg dimaksud UAV ?
2. Sebutkan tipe-tipe UAV ?
3. Jelaskan tentang drone copter ?
4. Jelaskan tentang Fixed Wing ?
5. Jelaskan tentang Vtol ?
6. Jelaskan tentang motor Brushles ?
7. Jelaskan tentang mengapa drone bisa terbang ?
8. Jelaskan tentang PWM ?
9. Jelaskan tentang payload dan gambarkan contohnya ?
10. Jelaskan tentang propeller clock wise dan conter clock wize ?
Jawaban.
1. UAV
Unmaned Aerial Vehicle (UAV) adalah sebuah pesawat tanpa awak. Karena tidak memiliki awak, UAV harus dikendalikan dari jarak jauh menggunakan remote control dari luar kendaraan atau biasa disebut Remotely Piloted Vehicle (RPV). Selain itu, UAV juga dapat bergerak secara otomatis berdasarkan program yang sudah ditanamkan pada sistem komputernya.

2. Jenis-jenis UAV
- Rotary wing (Copter)
- Fixed Wing
- VTOL (Vertical Take Off and Landing)
3. Drone Copter
Copter adalah drone yang menggunakan baling-baling (propeller) untuk terbang, drone jenis ini biasanya dikenal dengan multicopter atau multirotor. Untuk penamaannya disesuaikan dengan banyaknya motor atau propeller. Ada beberapa jenis tipe multirotor berdasarkan jumlah motor dan propeller

4. Fixed Wing
Jenis fixed wing ini menggunakan sayap untuk terbang, jenis fixed wing ini sendiri memiliki beberapa bentuk dan ukuran, tergantung pada kegunaannya masing-masing. Jenis fixed wing ini bisa ditenagai oleh batre.

5. VTOL
Vertical Take-Off and Landing (VTOL) adalah metode lepas landas dan mendarat secara vertikal. Pesawat dengan metode ini dirancang untuk digunakan tanpa memerlukan ruangan atau area yang cukup besar bagi lepas landas dan mendarat.

6. Motor Brushless
Motor BLDC merupakan suatu motor synchronous 3 fasa. Motor ini disebut dengan BLDC karena pada dasarnya BLDC menggunakan tegangan DC sebagai sumbernya. Hanya saja tegangan ini dikonversi menjadi tegangan AC 3 fasa dengan menggunakan inverter atau driver 3 fasa. Terdapat 2 metode untuk mengendalikan inverter atau driver yakni metode six-step dan metode PWM sinusoidal. Pada motor BLDC komersial, metode six-step sering banyak digunakan karena sederhana dan mudah diimplementasikan. Akan tetapi metode six-step memiliki arus rms yang lebih tinggi dan cenderung lebih bising dibandingkan dengan metode sinusoidal. Untuk menanggulangi kelemahan metode six-step digunakan metode PWM sinusoidal. Untuk menunjang proses komutasi elektrik pada pengendalian motor BLDC sehingga diperoleh kecepatan dan torsi yang konstan, digunakan sensor hall.(abe dharmawan, 2009).
Motor DC Brushless merupakan salah satu alat yang penting dalam rangkaian ini untuk menghasilkan EMF balik gelombang kotak atau trapesium. Ketika motor DC Brushless mendapatkan tegangan dari catu daya maka akan bergerak dam berputar membentuk putaran medan magnetik. Putaran ini juga akan menghasilkan torsi pada rotor magnetik.

7. Mengapa drone bisa terbang ?
Karena gaya angkat lebih besar dari gaya gravitasi (F angkat > F grafitasi) dimana motor penggerak baling-baling dapat mengangkat drone dikarenakan gaya gravitasi lebih rendah dari gaya angkat.
8. PWM
Pulse Width Modulation (PWM) secara umum adalah sebuah cara memanipulasi lebar sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata- rata yang berbeda.

9. Payload
Payload yaitu kapasitas berat pembebanan yang tidak melebihi kapasitas maksimum pada UAV.

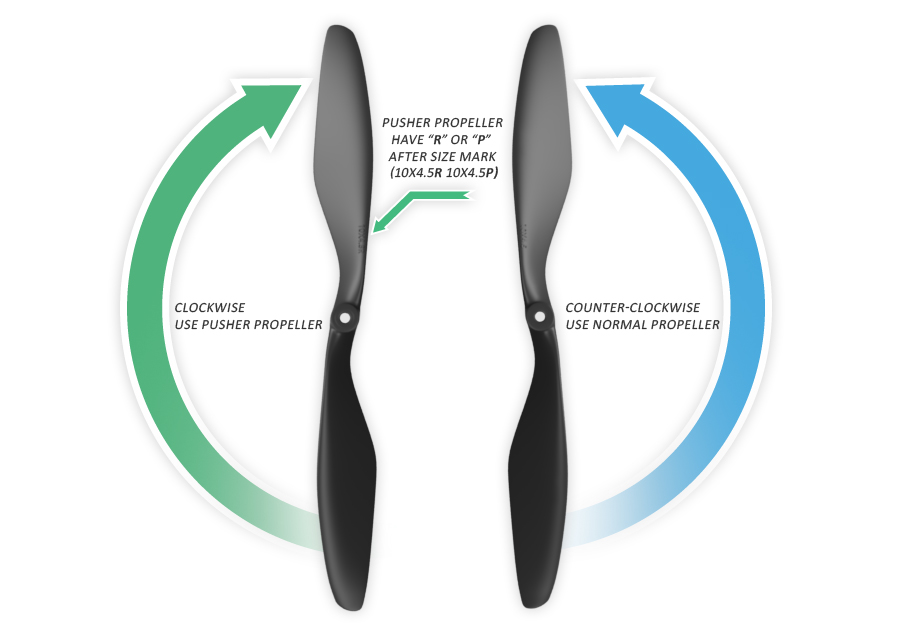
10. propeller CW & CCW
Propeller Clock Wise (CW) yaitu propeller atau baling-baling yang berputar searah jarum jam, Untuk Propeller Counter Clock Wise (CCW) yaitu propeller atau baling-baling yang dimana putarannya kebalikan dari arah jarum jam.
Komentar
Posting Komentar